×Fichiers du thème manquants :
themes/yeswiki/squelettes/responsive-1col.tpl.html
themes/yeswiki/styles/blue.css
Le thème par défaut est donc utilisé.
themes/yeswiki/squelettes/responsive-1col.tpl.html
themes/yeswiki/styles/blue.css
Le thème par défaut est donc utilisé.
Mecanique
Le Pad Mecanique
Quelques idées
1. L'axe traversant
- Cette solution technique propose un moteur à l'intérieur du tube qui entraîne un arbre fixe par rapport au châssis.
- Avantages
- Très robuste
- Permet un décentrage du pivot
- Permet d’arrimer l'orin de remonté du système en dehors du champs de vision de la caméra
- Inconvénients
- Nécessite un perçage sur une longueur importante
- Demande une précision inatteignable au Fab Lab
2. La motorisation extérieure
- Cette solution technique propose un moteur à l'extérieur du caisson.
- Avantages
- Pas de soucis d'étanchéité sur pièce tournante
- Toute les pièces sont usinables au Fab Lab
- Inconvénients
- Demande de surveiller le moteur qui risque de se corroder rapidement
- Les pièces mécaniques sont à protéger de l'extérieur
- Roue et vis sans fin imprimé en 3D
- Un autre couple roue et vis peut-être plus précis et plus robuste
- Imprimer des engrenages en 3D Le PCTPE semble être le meilleur matériau pour les engrenages en impression 3D. Il s'agit de nylon qui par nature est auto lubrifié. Le PLA ou l'ABS peut servir dans une moindre mesure.
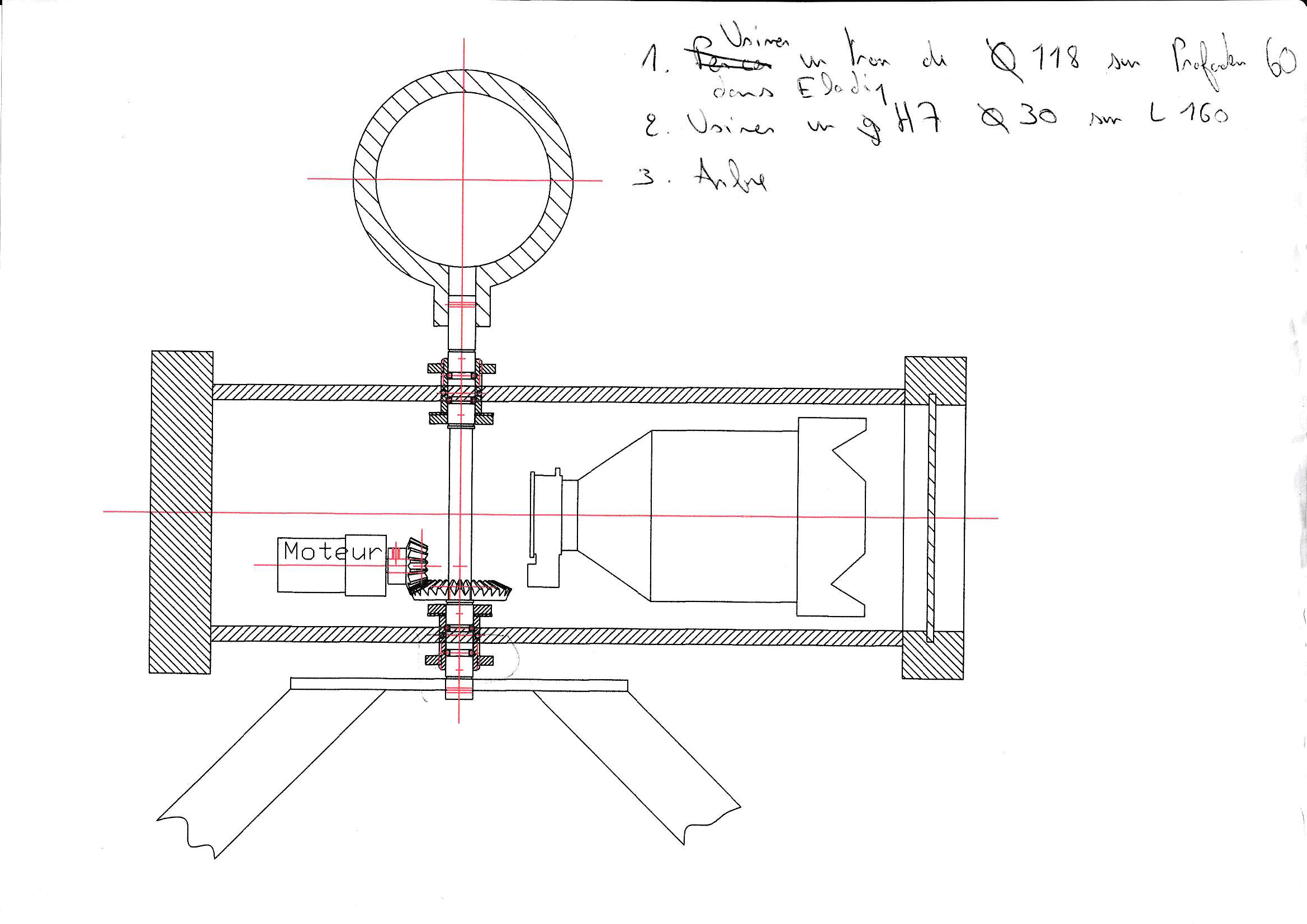
Nous avons deux solutions à creuser d'avantage, une solution avec un axe traversant une unique parois et non traversant totalement le caisson. Cette solution semble convenir à des applications scientifique pour sa robustesse, mais c'est une solution qui ne répond pas totalement aux objectifs de réaliser un système DIY constructible avec les moyens d'un FabLab. En effet, la précision que demande l'usinage des pièces pour étancher le passage d'un arbre rotatif est inaccessible avec l'outillage de notre fablab. Nous imaginons donc une autre solution technique utilisant un sytème d'entrainement placé à l'extérieur du caisson. Pour y parvenir, un moteur bruschless conviendra par sa submersibilité. On a selectionné pour ce travail un moteur de ROV de 350kv (350tr/min/V). Ce moteur entraînera un réducteur composé d'une roue et d'une vis sans fin ce qui permet d'éviter que le système ne tourne librement sous l'effet du courant, des houles.
3. La solution retenue
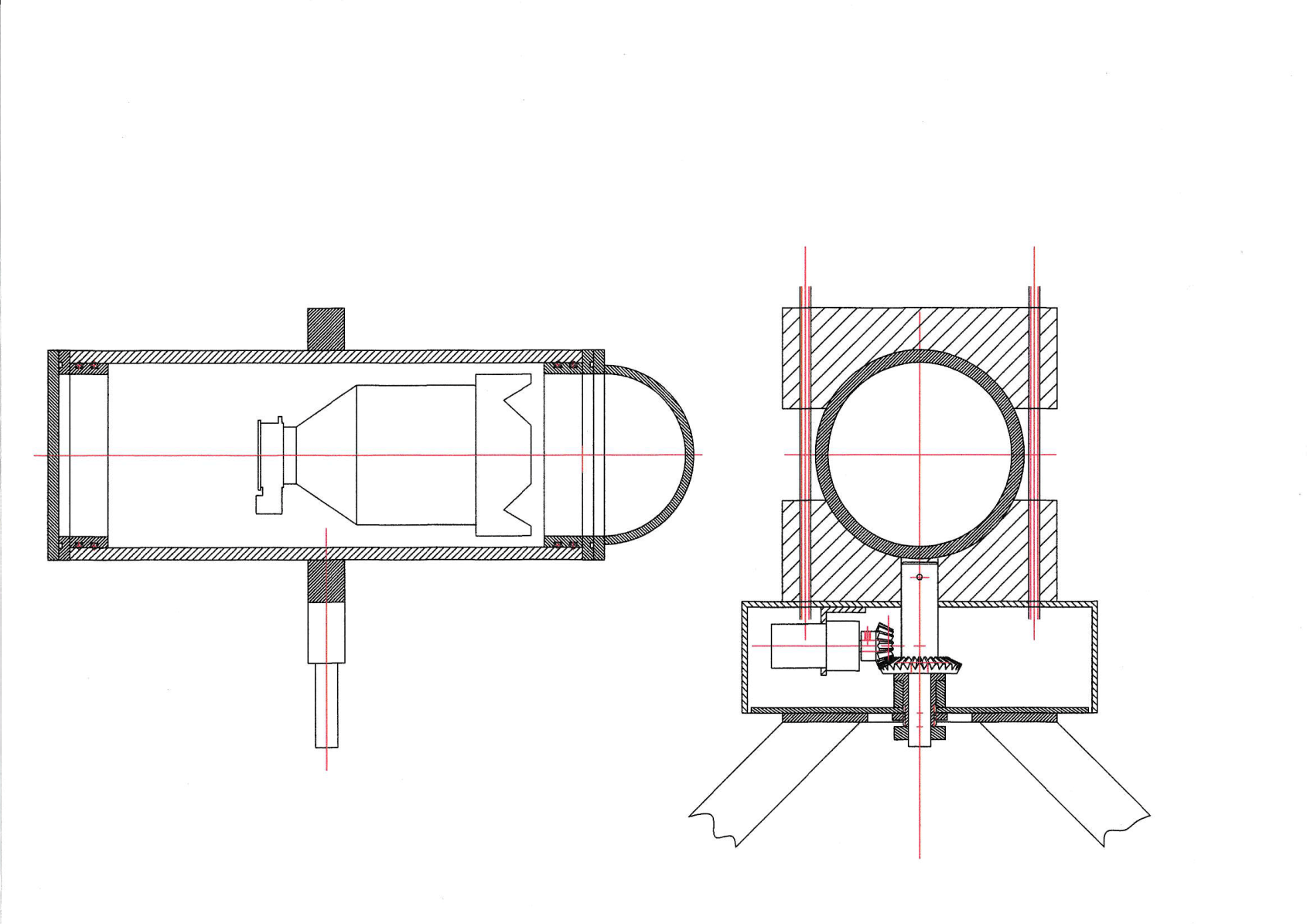
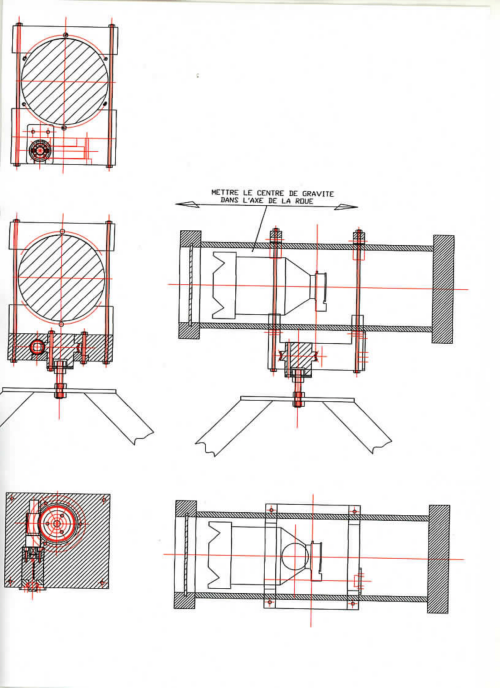
La solution technique ci-contre propose un moteur enfermé dans un caisson et qui entraîne une vis sans fin qui elle-même entraine une roue cranté. Le rapport est ici de 1/60.- Le tout sera en contact de l'eau
- La question est de savoir si les plastiques d'impressions 3D se comporteront bien dans l'eau de mer.
- Peut être faire un boitier en deux parties pour pouvoir être usiné à la fraiseuse numérique.
- Le rapport de réduction risque de ne pas être suffisant
Protocole de montage
Les informations suivantes correspondent à la dernière solution présenté.Etape 1 : Choix du moteur

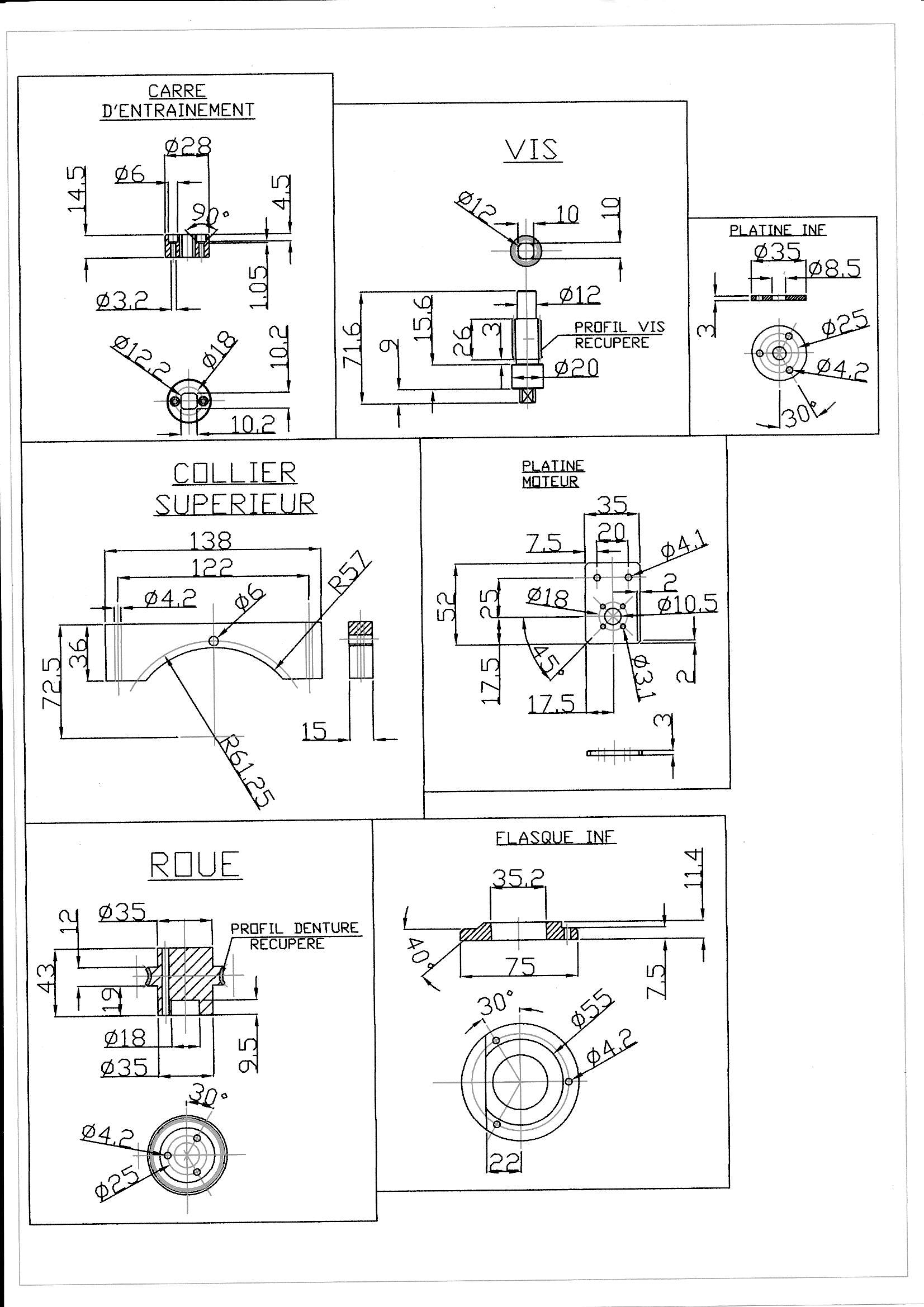
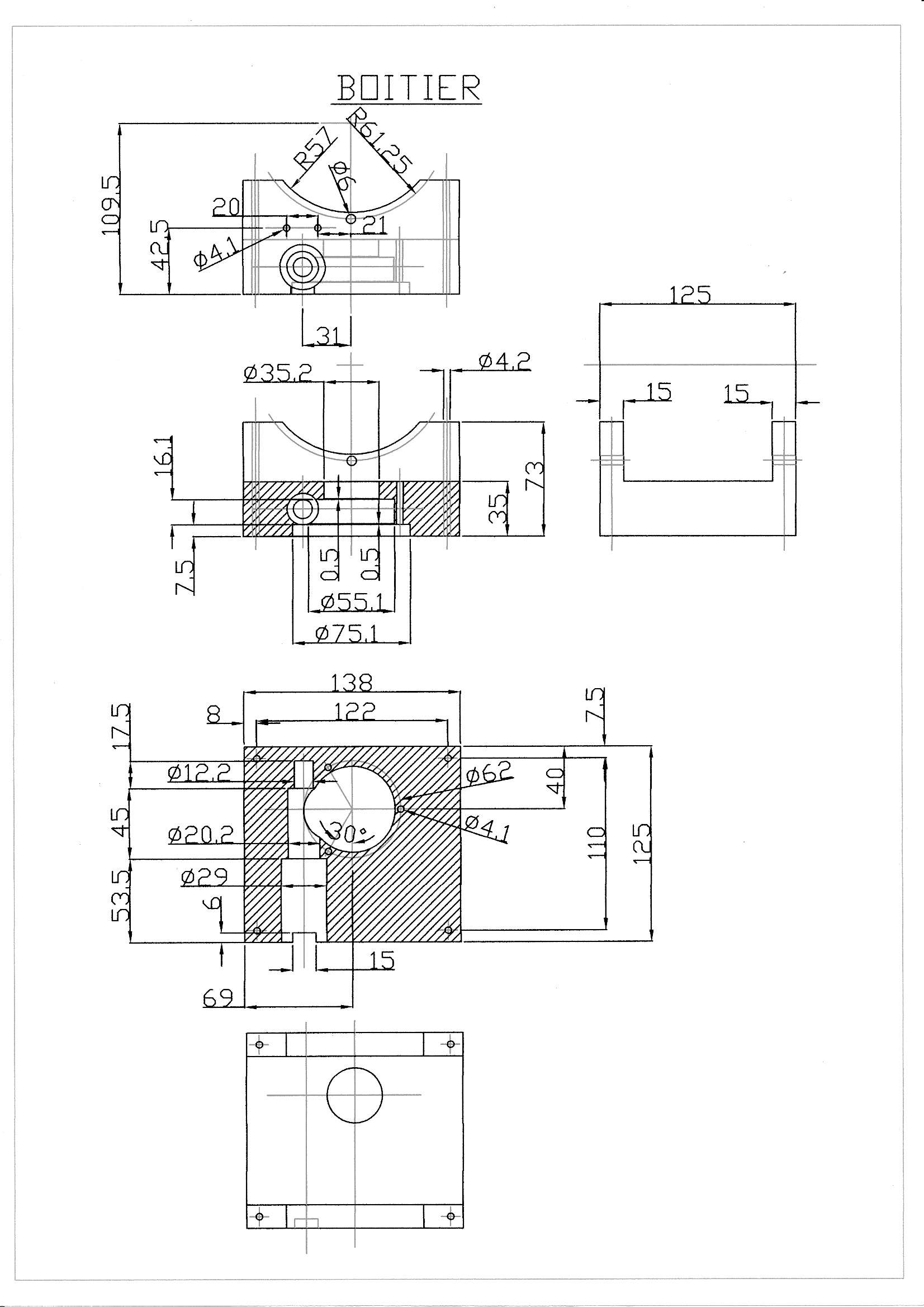
Etape 2 : Système de motorisation et réduction
Plans du système de motorisation
Le système de motorisation est placé à l'extérieur du tube. Le moteur brushless submerssible entraine sur cette version une vis qui fait tourner une roue. Le rapport de réduction sur ce système est de 1/60. Les engrenages (roue et vis sans fins) s'inspirent d'un modèles trouvé sur Thingiverse.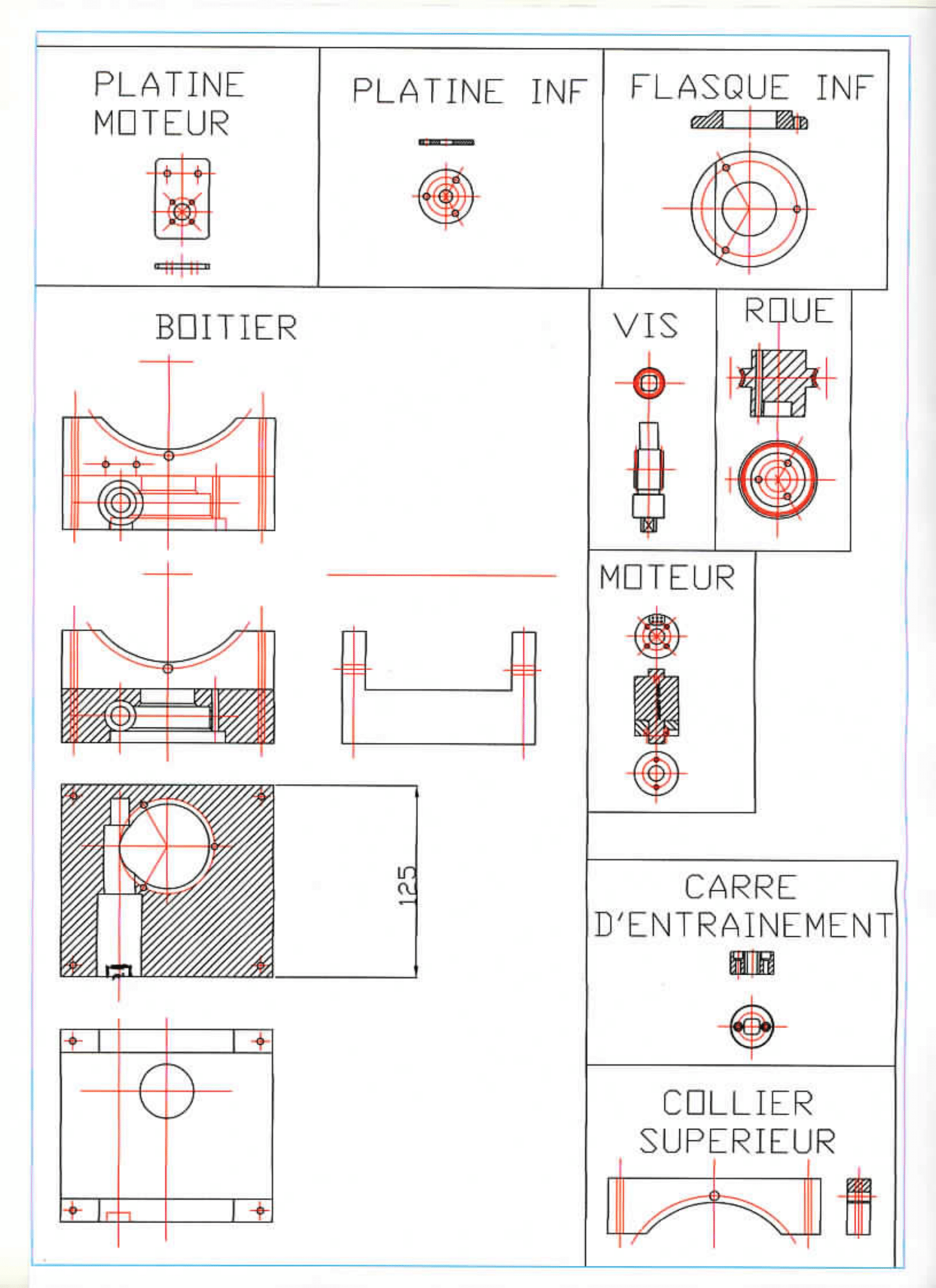
Modèles 3D
KOSMOS by ghe.leguen on Sketchfab
Modèles 3D à par Enora Furet à partir des Plans de Jean-Paul Gestalin
Des engrenages en 3D
- a retenir : Quand on dimensionne des engrenages le nombre de dents doit être un nombre premier. De ce fait toutes les dents du mené rencontrent toutes les dents du meneur. Ainsi les engrenages s'useront uniforméments
Problèmes rencontrés à l'assemblage
- Les hélices sont difficile à retirer du moteur. Utiliser une drémêle et couper l'hélice dans la logeur délicatement
Etape 3 : Agencement intérieur
Propositions d'agencements
Pièces de l'agencement en modèles 3D
KOSMOS - layout by ghe.leguen on Sketchfab
Problèmes rencontrés à l'assemblage
- manchon batterie
- Trop de support
- supprimer croisillon
- Impossible d'insérer les batteries
- Supprimer support batterie au profit de colsons
- connexion support objectif trop large
- La batterie gène l'insertion du support Pi cam
- Support R pi
- Trop étroi pour s'assembler
- Impossible de retirer le support entre les deux parties du support, les faire pleins